
Department of Mechanical and Materials
Engineering
This is Dr. Levy’s EML3222 System Dynamics Fall 2013 page
Florida International University is a community of
faculty, staff and students dedicated to generating and imparting knowledge through
1) excellent teaching and research, 2) the rigorous and respectful exchange of
ideas, and 3) community service. All students should respect the right of
others to have an equitable opportunity to learn and honestly demonstrate the
quality of their learning. Therefore, all students are expected to adhere to a
standard of academic conduct, which demonstrates respect for themselves, their
fellow students, and the educational mission of the University. All students
are deemed by the University to understand that if they are found responsible
for academic misconduct, they will be subject to the Academic Misconduct
procedures and sanctions, as outlined in the Student Handbook.
Here is the (8/27/2013) updated syllabus for the course.
My office is in EC3474, and email address is levyez@fiu.edu
My tel. no. is 305-348-3643. My fax no. is 305-348-6007/department fax no. is 348-1932
PLEASE NOTE
THAT WE HAVE LOST OUR TA. Please bring
your questions to me. Office
HRS are 75 minutes after class.
Photocopies of the 3 material selections relating to vibrations will be available in my office starting August 26. Please make up your groups and one of you come to my office to get the materials. Cost is $15 per set.
Please start reading the first and second section-Chapter 1 and 2 materials. I will be assigning examples out of those materials starting next week (9/2). So it would be to your benefit to come pick up the copies for your group.
Out of the photocopies of the first
two selections do the following:
Problems 1.7 to 1.10, 1.13, 1.16, 1.19, 1.22, 1.26, 1.27, 1.29, 1.31,
1.32, and 1.36.
This
material and all the linked materials provided, except where stated
specifically, are copyrighted © Cesar Levy 2013 and is provided to the students
of this course only. Use by any other
individual without written consent of the author is forbidden.
PLEASE USE THE
WINDOWS MEDIA PLAYER TO VIEW THESE VIDEOS.
Here is Lecture 1 related video and here are the pages related to that video lecture: page 1, page2, example, page 3, page 4, page 5
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here is Lecture 2 related video and the pages related to the video: page 6, page 7, and page 8
{kind=link}
{kind=link}
{kind=link}
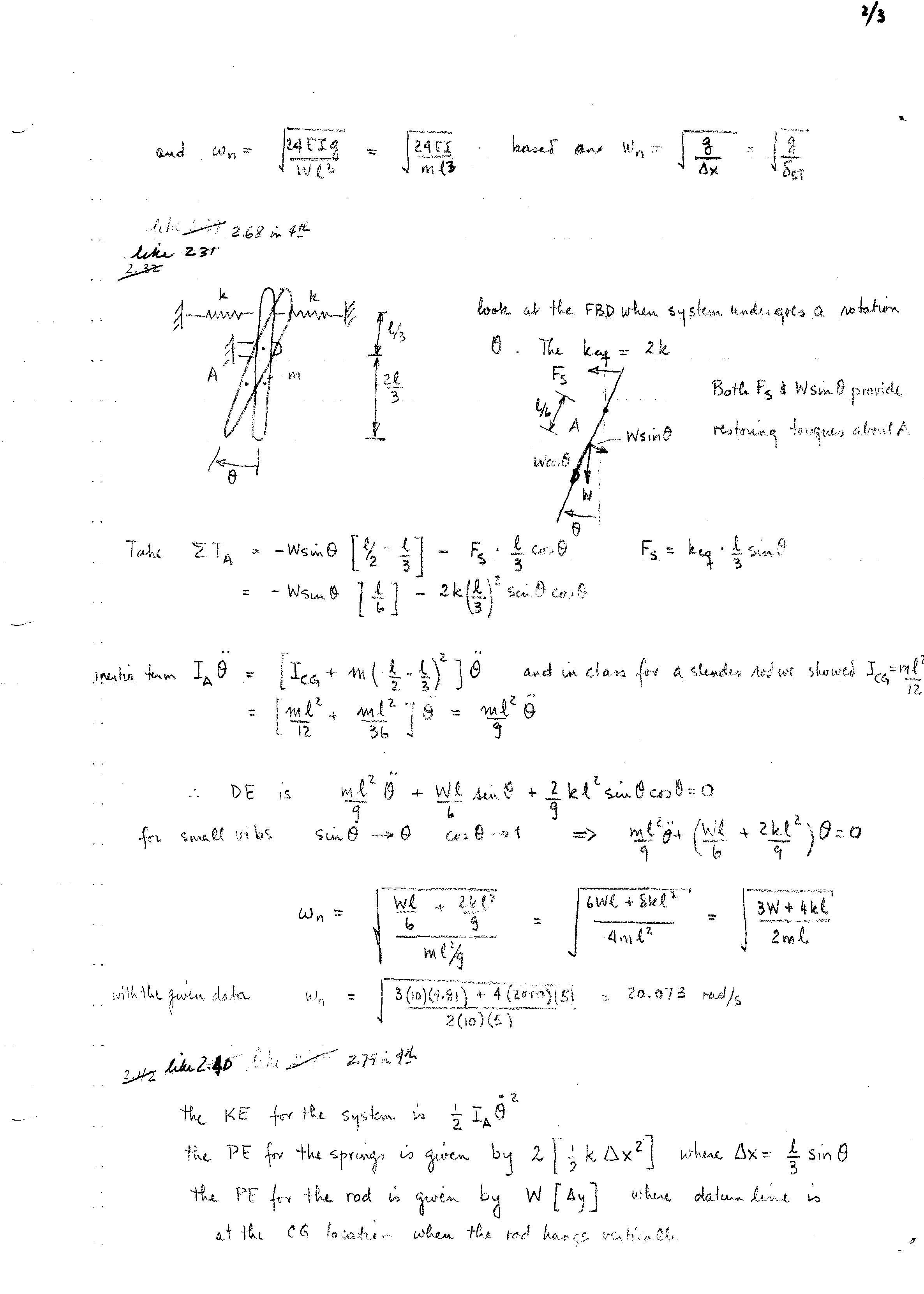
Please make sure that you have the following information about second order systems, namely:
 where g is the
acceleration of gravity and Dst is the
static displacement of the system; that is, weight of the system = k*Dst.
where g is the
acceleration of gravity and Dst is the
static displacement of the system; that is, weight of the system = k*Dst.
And for systems with damping included: ![]() =2ςωn and
=2ςωn and ![]() =ς and Ccrit=2mωn =2√mk
=ς and Ccrit=2mωn =2√mk
Here is Lecture 3 related video: equation of motion for linear mechanical, linear rotational, inverted pendulum
Here is Lecture 4 related video: equivalent springs both linear and rotational, springs in parallel and series
Here is Lecture 5 related video: equivalent springs and masses using equivalent potential and kinetic energies
Here is Lecture 6 related video: we look at damped systems, derive equations and talk about overdamped, critically damped and underdamped systems
Here are solutions to some of the problems… problems 1-7 and 1-8, 1-9 and 1-10
{kind=link}
Here are problems 1-13a and 1-13b, 1-29, 1-30, 1-35 and 1-35b
{kind=link}
{kind=link}
{kind=link}
{kind=link}
This material and all the linked materials provided, except where stated specifically, are copyrighted © Cesar Levy 2013 and is provided to the students of this course only. Use by any other individual without written consent of the author is forbidden.
Here is Lecture 7 video: we look at underdamped systems, derived logarithmic decrement and talk about two problems.
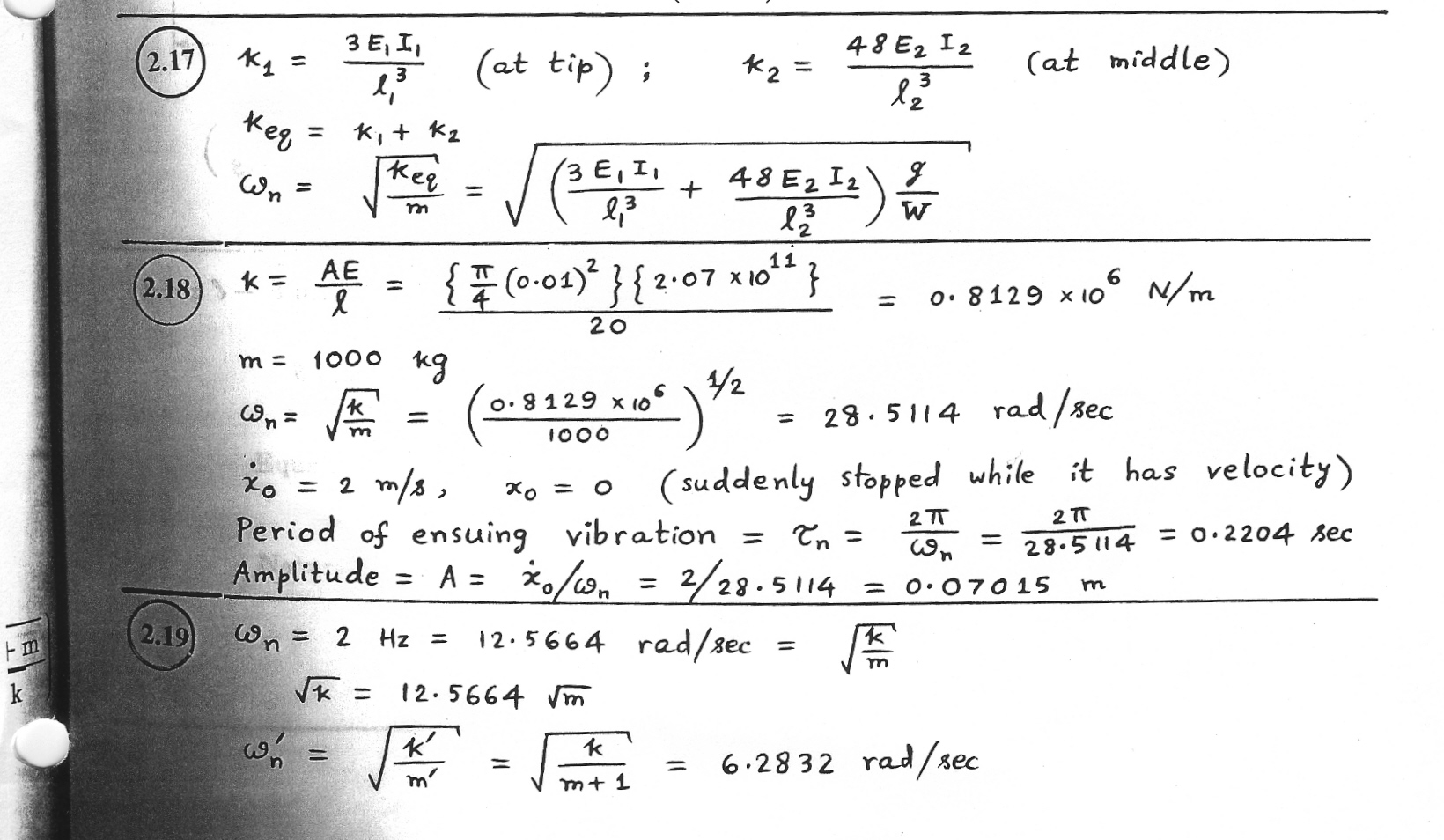
Look at Problems 2.1-2.4, 2.6, 2.7, 2.17 to 2.19, 2.28, 2.38, 2.45, 2.52, 2.60, 2.80, 2.82, 2.83, and 2.97. These are from the handout
Now for underdamped
systems: the logarithmic decrement, δ, equals  where ζ is the damping ratio. NOTE δ IS NOT EQUAL TO Dst
THE STATIC DISPLACEMENT
where ζ is the damping ratio. NOTE δ IS NOT EQUAL TO Dst
THE STATIC DISPLACEMENT
Also we showed that δ =
(1/N) * ln(xo/xN) = (1/N) * ln(xi/xi+N)
where N = the
number of cycles between the first and last measurement. x here is the
displacement and the subscript “o” means the first measurement value. The formula also applies between any N
cycles, meaning starting from cycle i and going to cycle i+N.
We will discuss the forced vibration of systems
and cover the topic of resonance in a future lecture.
PLEASE NOTE THAT WE HAVE LOST OUR
TA. Please come with your questions to
my office. Office Hours are 75 minutes
after class. Thanks, Dr. Levy
Please start reading Chapters 1 and 2 in the book by
Rowell and Wormley.
Here is Lecture
8 video: we look at forced vibration and derive the displacement function
for a harmonic force F(t)=P sinwft. We discussed the effect of frequency ratio r=wf/wn
and damping ratio ζ.
I am adding one more videotape in
which problems on problems related to rotating unbalance and how to find the
displacement due to forced vibrations Lecture 8a. Please see it before
the exam. The book
from which the problems are taken are Vierck,
Vibration Analysis.
This material and all the linked materials provided, except where stated specifically, are copyrighted © Cesar Levy 2013 and is provided to the students of this course only. Use by any other individual without written consent of the author is forbidden.
Here is Lecture 9 video: we cover two problems, one forced undamped and one forced damped vibration problem. We then begin the topic of system dynamics by defining the through and across variables, the elemental and constitutive equations, the ideal and pure element. Here are the pages that go with the last part of the lecture: page 9, page10, page11, and examples,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Our first exam is scheduled for October 2 and will cover everything related to vibrations including systems under forced vibrations
Here are problems 2-4, 2-6 and 2-7 Note that more comments about 2-7 are found on the top of the page for problem 2-13
{kind=link}
Here are problems 2-17, 2-18, 2-19
{kind=link}
Here are problems like 2-28, 2-38
{kind=link}
Here is the rest of 2-38, and problems 2-68, 2-79
{kind=link}
Here is problem 2-45
{kind=link}
Here is problem 2-60
{kind=link}
Here, the second problem is like problem 2.80
{kind=link}
Here are problems the first two are like 2.83, 2.97
{kind=link}
We
will have our first quiz on Wednesday Oct 2 on vibrations related to the three
handouts (free and forced vibrations, vibrations with and without damping,
forces transmitted to the support and rotating unbalance). You are allowed 2 8.5x11 inch pages of
formula sheets only. This quiz will cover materials
from videos 1-9, and 8a.
Please review the videos for the examination. We will pick up from the point where we left off today.
Lecture 12 - exam
Here is the material that goes with Lecture 13 video on rotational mechanical systems and transformers, both rotational and linear mechanical: page12, page 13, page 14, page 15, page 16.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here is the material that will go with Lecture 14 video on transformers including rack and pinion: page 16, page 17, and continues on page 18, page 19, page 20, examples with electrical elements including transformers and transducers, examples with electrical elements 2, page 21
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
This material and all the linked materials provided, except where stated specifically, are copyrighted © Cesar Levy 2013 and is provided to the students of this course only. Use by any other individual without written consent of the author is forbidden.
The information on pgs 17-21 of Rowell and Wormley’s book deals with electrical elements: capacitors, inductors and resistors. They are like electrical “masses”, “springs” and “dampers”. The material will not be covered in depth in class but you will be responsible for it. I will skim over the material to cover the main elements, transformers and transducers. Just note the similar way we can describe electrical elements in comparison to linear mechanical and rotational mechanical elements.
Start reading chapter 6 on
transducers in one energy domain (transformers) and transducers in multi energy
domains (transducers)
Work
on the following problems 1.1, 1.4, 2.2, 2.4 from your
books not the notes. Solutions will be
posted next October 11.
Here are the pages that go with Lecture 15 on Fluid systems: page 22, page 23, page 24, page 25, page 26.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here are the Problems 1.1, 1.4, 2.2, 2.4 and the solutions: problem 1, problem 2a 2b, problem 3a 3b, problem 4
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Please do problems 4.1, 4.2, 4.5 and 4.11 in your books. Their solutions will be revealed on October 23, 2013.
Here is the material that will go with Lecture 16 video: page 26, page 27, page 28, page 29, page 30,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here is the material that will go with Lecture 17 video for 10/23: page 30, page 31, page 32, page 33, page 34, example solution. Here is the material that goes with Lecture 18 for 10/23 as well: page 36, page 37, page 38, page 39, page 40, page 41, page 42.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Though I have uploaded what we will cover this week, I also plan to do some problems not covered in the videotapes. You will be responsible for those problems as well.
This
material and all the linked materials provided, except where stated specifically,
are copyrighted © Cesar Levy 2013 and is provided to the students of this
course only. Use by any other individual
without written consent of the author is forbidden.
Here is the material that goes with Lecture 19 video: page 42, page 43, page 44, page 44solution,, page 45-46 examples, page 45-46solns
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here is the material that goes with Lecture 20 video: page 47, page 48, page 49, page 50, and page 51,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here is the material that goes with Lecture 21 video: page 51, page 52, page 53, page 54,
{kind=link}
{kind=link}
{kind=link}
Here is the material that goes with Lecture 22 video: page 54, These are the solution to page 54 top and bottom problems page 55, page 56. We also will cover page 57, page 58,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
HERE I provide you
with the solutions to PROBLEMS 4.2, 4.3, 4.6d and 4.11d
{kind=link}
{kind=link}
{kind=link}
{kind=link}
You are also suggested to
develop the state equations for three problems -- the two problems we did
(given on page 54, 55 and 56 of the notes on the website) and problem 6.15 in your book.
We now begin talking about state equations.
I AM INCLUDING HERE TWO PDF FILES THAT MIGHT HELP YOU: ONE IS
ON LINEAR
GRAPHS AND ONE IS ON STATE
EQUATIONS. THESE DOCUMENTS ARE THE
PRECURSOR DOCUMENTS THAT LED TO THE BOOK SYSTEM
DYNAMICS, AN INTRODUCTION, BY ROWELL AND WORMLEY.
We now begin talking about state equation solutions. This solution methodology depends on understanding matrices. For those who need a review of matrices, here it is.
Also look at the STATE EQUATIONS FILE which comes from your book to find more examples for deriving state equations. Please note that the figure numbers used in the file can be found at the end of the file.
This
material and all the linked materials provided, except where stated
specifically, are copyrighted © Cesar Levy 2013 and is provided to the students
of this course only. Use by any other
individual without written consent of the author is forbidden.
Next exam is announced for November 15 (NOTE CHANGE IN DATE): materials related to getting system graphs; elemental, vertex, loop equations and state equations will be on exam. Further announcements will be made closer to the exam date.
Here is the material that goes with Lecture 23: discussed state variables and how to get the state variable equations and how to solve state variable equations- page 57, page 58, page 59, page 60, page 61, page 62, page 63
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
As a way of understanding what was covered in today’s class,
do the following problems:
Solve these ![]() and
and  and
and 
The solution to these problems will be revealed next week.
Reminder-Next exam is announced for November 15 (NOTE CHANGE): materials related to getting system graphs; elemental, vertex, loop equations and state equations will be on exam and basic definitions. You are allowed 3 8.5 x 11 formula sheets for the second exam but NO solved problems or definitions.
Here is the material that goes with Lecture 24
video: We reviewed finding the particular
solution and how to deal with equal roots page 63,
page
64 Another example for you to review
on solution of matrix differential
equation for the following matrix problem
{kind=link}
One of the students asked about how to handle the situation
where the A-lI=0 leads to complex eigenvalues. Here is a document that gives
an example of what to do.
As a review of system
graph and state equation derivations look at this problem.
The state equation solution is given in the top half of
the page.
{kind=link}
{kind=link}
This
material and all the linked materials provided, except where stated
specifically, are copyrighted © Cesar Levy 2013 and is provided to the students
of this course only. Use by any other
individual without written consent of the author is forbidden.
Here is the solution to the
matrix differential equation problems given previously– Problem 1 and 2, Problem 3.
{kind=link}
{kind=link}
Here is the material that goes with Lecture 25
video. The following system is discussed
including getting the system graph. We also show the state
equation solution which is given in the bottom
half of the page.
{kind=link}
The last exam which will deal
with both the analytical solution of matrix equations and numerical solution of
differential equations will occur on Nov 27.
We started discussing numerical solutions of the state equations in Lecture 26. The materials which were discussed at the end of Lecture 24 tape is given for the numerical solution of these state variable equations page 65, page 66,
{kind=link}
{kind=link}
A handout will be given and discussed. The handout is from Applied Numerical
Methods by James, Wilford and Smith, pages 339-345
and 351-353.
We will continue our discussion of numerical solutions of the state equations in Lecture 27. the rest of the numerical solution of sets of first order differential equations will be discussed. A handout will be given in class on the Runge-Kutta method. The handout is from Applied Numerical Methods by James, Wilford and Smith, pages 339-345 and 351-353. If you miss class, stop by my office to get your copy. We plan to look at several examples and how they could be used in the different numerical methods discussed, namely: Euler, Modified Euler, Runge-Kutta Second Order method, Runge-Kutta Fourth Order Method
The last
exam which will deal with both the analytical solution of matrix equations and
numerical solution of differential equations will occur on Nov 27 (please note change). You are allowed 3 8.5 x 11 sheets of paper for the exam. Please NOTE CHANGE in number of formula
sheets.
This
material and all the linked materials provided, except where stated
specifically, are copyrighted © Cesar Levy 2013 and is provided to the students
of this course only. Use by any other
individual without written consent of the author is forbidden.
In Lecture 28
we will discuss the solution of a mass-spring-damper system with general
forcing function. In this lecture we
will cover the solution to the transient and steady state parts of the
equation:
![]() , which is rewritten as
, which is rewritten as
![]()
Please work on problems 8.18,
8.9, 9.8 and 9.23 in your book. The
solutions are given below as a check for you.
Exam November 27: you are allowed 3 8.5 x 11 formula sheets for the third exam (please note change in formula sheet number). materials related to solving matrix differential equations and numerical methods will be on exam.
The pages dealing with the 2nd order differential equations
given above: page 1, page 2,
page 3, page 4.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here are the solutions to Problem 8.9d in your books and another problem
{kind=link}
Here are solutions to 8.18
and 9.8
8.18a(i): t=1/2 and y=Ce-2t
. Since y goes to zero as t increases,
this is stable.
For (ii) t=-1/2
and y=Ce2t
. Since y goes to infinity as t
increases, this is unstable
8.18b:
(i) when
a < -1/4 the solutions to the characteristic equation are complex. But the
real part of the solutions to the characteristic equation is negative, so the
behavior is dying oscillatory. Therefore
the solution is asymptotically stable in that the solution goes to zero
as t increases, but it oscillates while it goes to zero. The system is underdamped.
(ii) When a=-1/4, the system
is critically damped; both solutions are dying exponentials and so the solution
to the ODE is stable.
(iii) When -1/4 < a < 0
both solutions to the ODE are dying exponentials and the solution is stable. This is an overdamped system since both rooms
of the characteristic equation are negative.
This material and all the linked materials provided, except where stated specifically, are copyrighted © Cesar Levy 2013 and is provided to the students of this course only. Use by any other individual without written consent of the author is forbidden.
(iv) When a=0, the solution to the ODE is unstable; one
solution is a dying exponential but the second solution is t which increases as
t increases.
(v) When a > 0, both solutions to the ODE
are increasing exponentials; and so the solution to the ODE is unstable.
8.18c: solutions are
sinusoidal and so the solution is neutrally stable as they oscillate
about the y=0 line but do not increase without bound with time.
9.8 has
no state variable since the velocity of the mass, v, is the same as the source,
which is assumed known for all time.
But, the governing equation
is (m/B) dv/dt + v = Fv(t)/B where -Fv(t) is the conjugate
variable to the source. Here (m/B) is
the time constant of the system. Since v
is known for all time and so is its derivative, then the left hand side is
known for all time. Thus the conjugate
variable can be calculated for all time.
To determine the time
constant for a first order equation, make the coefficient of function v =1 in
the equation (see previous paragraph), then the coefficient of dv/dt is the time constant.
To determine the time
constants (there are two) for the second order system:
Overdamped system: t=1/|s1| and 1/|s2|
Critically damped system: t=1/ωn
Underdamped system: t=1/ζωn
REMINDER: Final
exam will be on December 11 between 1200-200pm.
Place will be announced.
It is a comprehensive exam that
includes the vibrations covered at the beginning of class and the system
dynamics. You will be allowed to bring
in 8 8.5 x 11 in sheets into the examination.
These sheets should be formula sheets only. Any sheets containing former exams of yours
or others will be confiscated and you will forfeit the examination.
This material and all the linked materials provided, except where stated specifically, are copyrighted © Cesar Levy 2013 and is provided to the students of this course only. Use by any other individual without written consent of the author is forbidden.
It is suggested that your 8
sheets contain the following:
1 sheet on the elemental
equations; 1 sheet with the transformer/transducer equations,
2 sheets on vibrations related
information; 2-3 sheets related to matrix/numerical methods, and 1 sheet of
miscellaneous information you believe will help you.
Please make sure
you take care of your restroom needs before you start the exam. There will be NO bathroom breaks.
Bring a working calculator and
backup battery. Turn off all cellphones, iPODs.
Come in and take alternate seats
as we do with all exams.
Bring pens, pencils and erasers
I will provide exam and paper.
FOR THE FINAL! With respect to the sheet that you are
allowed to bring into the exam in which you have your numerical methods
formulas:
Please make sure you have the information for all the
numerical methods we discussed either in class and/or in the
numerical methods handout given in class, namely
1)
Euler
2)
Modified Euler
3)
Runge-Kutta
2nd order which is like the modified Euler
4)
Runge-Kutta
2nd order known as the midpoint method
5)
Runge-Kutta
3rd order
6)
Runge-Kutta
4th order
and how to use these
methods if you have more than one state variable equation, as well.
In Lecture 28 we will
discuss the solution of problem 9.23 in your books. Note
that the solution is tending towards Vm =0.2 m/s
which is the steady state solution of the problem due to the step increase to Vm=0.2 m/s that occurs at t=0+.
and here is the solution graph. We also discussed
the lever transformer (teeter-totter) when the fulcrum is at rest and when it
is acted upon by a source. We discussed
the linear graph of the two problems and answered some questions.
{kind=link}
This material and all the linked materials provided, except where stated specifically, are copyrighted © Cesar Levy 2013 and is provided to the students of this course only. Use by any other individual without written consent of the author is forbidden.