 |
|||||
| Home | Research | For Teachers | HISTORY Level 1 Level 2 Level 3 |
PRINCIPLES Level 1 Level 2 Level 3 |
CAREER Level 1 Level 2 Level 3 |
| Gallery | Hot Links | What's New! | |||
| Web Administration and Tools | |||||
|
|||||
| Home | Research | For Teachers | HISTORY Level 1 Level 2 Level 3 |
PRINCIPLES Level 1 Level 2 Level 3 |
CAREER Level 1 Level 2 Level 3 |
| Gallery | Hot Links | What's New! | |||
| Web Administration and Tools | |||||
This section will present the theory of takeoff and landing for conventional aircraft. Conventional aircraft would be any aircraft with a main gear, a nose gear and a single source of thrust at some angle of incidence it. Therefore, "conventional" could include some aircraft that are considered STOL (Short Takeoff Or Landing). One could derive equations that are more complex for a VSTOL (Vertical or Short Takeoff Or Landing).
Takeoff Parameters
Let us define the following forces, distances, angles and coefficients as depicted in the following drawing.
Dbw = Drag of the aircraft body and wing - along the aircraft flight path axis
During the ground roll, the flight path will be parallel to the runway
Dt = Drag of the aircraft tail - acts along the aircraft flight path {this term is often lumped into the body drag for aircraft without a T-tail}.
L1 = Lift of the wing - acts perpendicular to the flight path
L2 = Lift of the tail - also acts perpendicular to the flight path
Wt = gross weight - acts through the center of gravity of the aircraft.
Fn = net thrust acting parallel to the flight path. {We will however include a term perpendicular to the flight path}
F1 = Load on the nose gear.
F2 = Load on the main gear.
X1 = Distance from the nose gear to the aircraft center of gravity.
X2 = Distance from the main gear to the aircraft center of gravity.
XL1 = Distance from the center of gravity to action point of the wing lift (Mean Aerodynamic Chord)
XL2 = Distance from the wing lift point to the tail lift action point.
Z1 = Height of the body axis of the aircraft above the ground plane.
Z2 = Height of the tail center of lift and drag above the aircraft body axis.
![]() = Aircraft pitch
attitude.
= Aircraft pitch
attitude.
![]() = Runway slope.
= Runway slope.
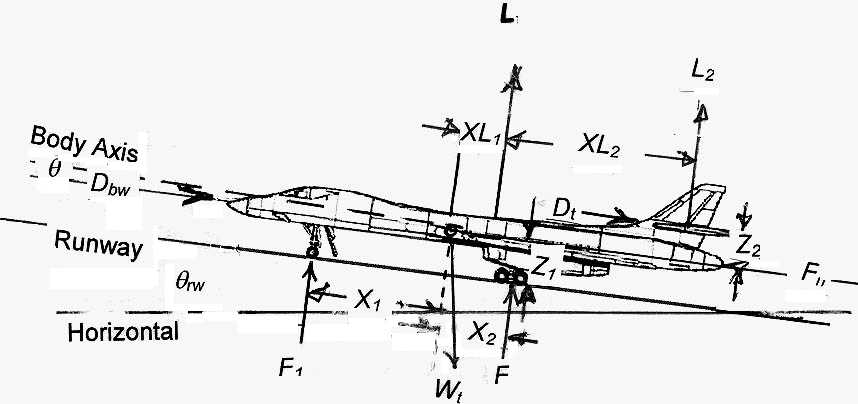
Not shown on the drawing (to avoid clutter) is gross thrust (Fg) and the engine inlet drag (Fe).
Using the above diagram, we can formulate the equations of motion for the aircraft during the ground roll. The equations are the same for either a takeoff or a landing. Forces are in pounds; speeds in feet per seconds and angles are in degrees.![]()
it = Thrust Incidence Angle
D = Total Aerodynamic Drag
Frw = Total Runway Resistance
Fex = Excess Thrust
with:
where:
= Coefficient of friction associated with the nose wheels.
= Coefficient of friction associated with the main wheels.
Also,
where:
Nx = Longitudinal Load Factor

g0 = 32.174 feet/second2
Vg = Ground Speed
Collecting terms:
- Requiring the summation of forces in the Z-axis to be zero. ( note: The positive Z-axis direction is perpendicular to the runway and pointing towards the top right of the page.)

- Requiring the summation of moments about the Y-axis to be zero. ( note: The Y-axis in this case is perpendicular to the page and coming out of the page.) We will take moments about the main wheels, since the aircraft will pitch about the main wheels during the takeoff or landing ground roll. We will ignore any pitch dynamics during the ground roll. We will ignore any moment caused by the vertical component of gross thrust.

What we now have is three equations with three unknowns for purposes of simulating a takeoff or landing ground roll. It is assumed that one has a thrust and drag model for the lift, drag, gross thrust, and engine drag terms in the above equations.The three unknowns are the two normal forces on the wheels (F1 and F2) and the excess thrust (Fex). Of course, the primary parameter of interest is the excess thrust from which we can compute the derivative of ground speed. Once we have the excess thrust, we can differentiate the ground speed derivative to obtain speed and distance versus time.
Collecting the three equations:

Rearranging the equations:
We will define the terms in the square brackets in each one of the equations as A1, A2 and A3, respectively. Then we can rewrite the three equations in matrix form as follows:
Here the matrix equation is of the form C F = A, where the bold letters represent vectors and C is the three-by-three matrix. We need to solve for F.
During the course of flight test, we measure excess thrust (Fex). However, the thrust and drag may be unknown, or at least not known precisely. Therefore, we may need to iterate between the above equation and the solution of the above equation. The A1 term is thrust minus drag minus the runway component of weight.
The above matrix relationship can be solved by multiplying both sides by the inverse of the square matrix, C, namely C-1, as long as the determinant of C is not zero. Thus
Developing a Takeoff Simulation
Usually, the designer will provide an initial estimated model for lift and drag as a function of angle of attack (a ). Normally, a is zero during the ground roll and that is why it was not included in the above general equations. The thrust incidence angle, it , is always usually either zero or small. Only the most precise simulations will typically account for a separate tail and body drag, so we can ignore Dt, the drag of the tail, in many cases. Accounting for tail lift and drag becomes more important when modeling braking performance to determine the load distribution on the main gear and the nose gear.
For takeoff performance, a value of 0.015 is usually assumed for the rolling coefficient of friction (m ). In addition, a point mass model will be assumed with all the forces acting through the center of gravity of the aircraft. With these assumption, the three equations reduce to two equations, namely:
where mF=Frw.
Combining the above two equations by substituting for F leads to:

The above equation can be used in two ways:(a) first, to solve for excess thrust, i.e.,
or, (b) second, to solve for thrust minus drag, i.e.,
We know (or assume values for) the other variables.
From the first equation, we can compute the excess thrust during the ground roll of the aircraft. One would be provided models for net thrust drag and lift. The drag and lift models would be in the form of drag and lift coefficients versus angle of attack. Typical model formulations are as follows:
where:
M = Mach number
H = Pressure altitude
Ta = Ambient temperature
a = angle of attackhAGL = Aircraft wing height above ground level
The fuel flow is required in order to account for weight change during the takeoff. The parameter hAGL is needed to account for ground effect. The above are just typical model forms. They may also include Reynolds number terms. In addition, the engine is usually not at 100% thrust at brake release so a thrust spool up factor needs to be supplied.
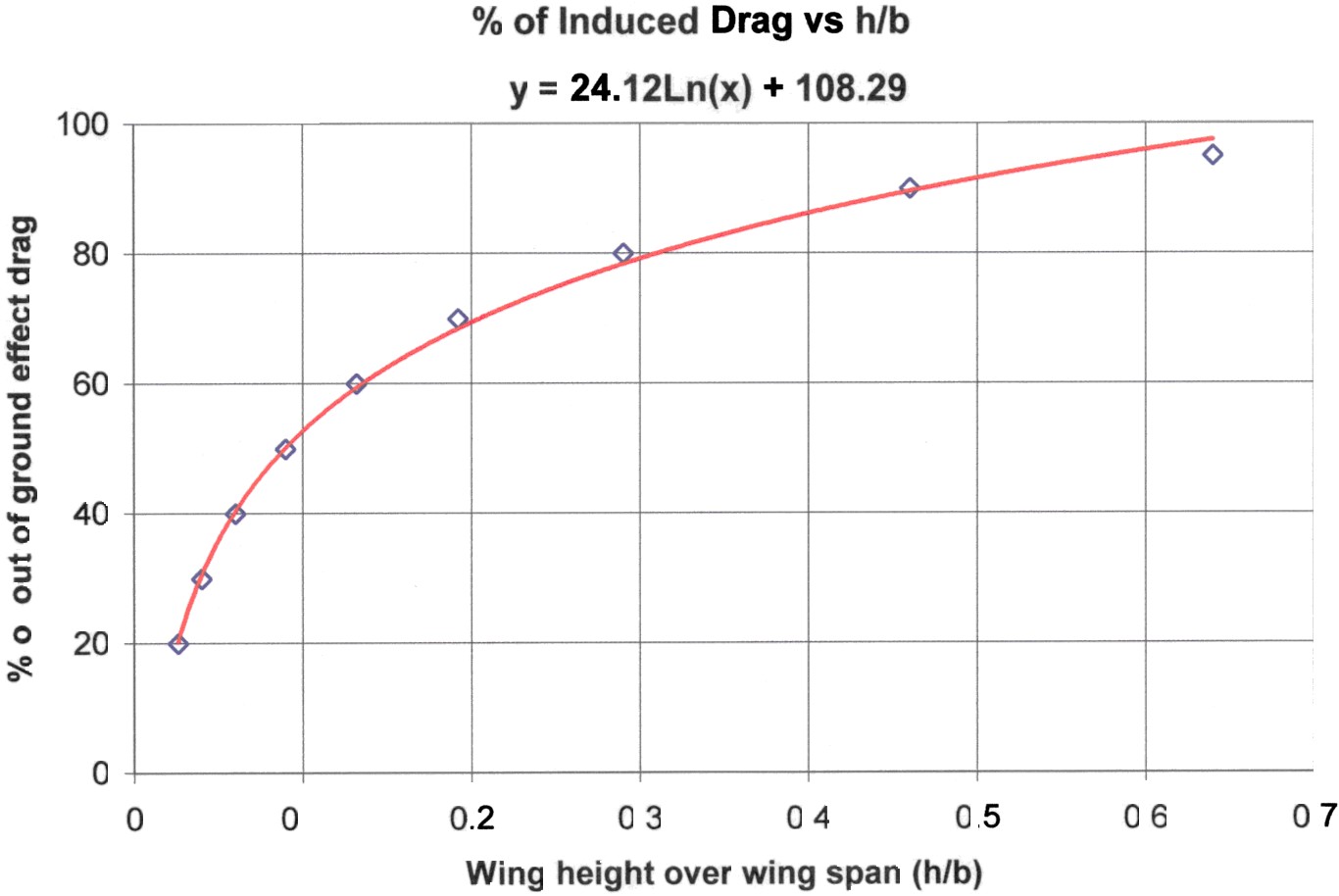
Ground Effect
The following plot is typical of a relationship defining the decrease in drag due to lift in ground effect.
A very simplified model that approximates an F-16 in military thrust was created to illustrate takeoff simulation. The model constants and equations are as follows:S = 300. = reference wing area (feet2)
b = 35. = wing span (feet)
AR = 4.0 = b2/S = Aspect Ratio
hw = 5.0 = height of wing above ground while aircraft on the ground (feet)
Wts = 25,000. = start gross weight (pounds)
Fno = 10,000. = thrust at zero Mach (pounds)
Fnslope = 5,000 = slope of thrust vs. Mach (pounds)
KFn0 = 0.65 = thrust factor at zero time
t = 2.0 = thrust time constant (seconds)
We assume that the overall thrust factor increases from its zero time value via the formula
and if KFn >1, then KFn = 1.
The equation for the net thrust for this model becomes:
and the weight of the fuel can be related to the thrust by:
where sfc = thrust specific fuel consumption.
The percent of out of ground effect drag is computed from (see previous graph)

under the condition that XGE =1.0 , if XGE >1.0.
With the following parameters defined, namely,Clmin = 0.05 = lift coefficient corresponding to minimum drag
Cdmin = 0.0500 = minimum drag coefficient
then the drag coefficient (Cd) is computed as follows:
With the definition of the initial pressure altitude for the runway, for example,HC = 2,300 feet = initial pressure altitude
then the ambient pressure ratio (d ) is as follows:
and we may relate it to the standard day value at sea level by

where:
Pa = ambient pressure, and
PaSL = ambient pressure standard day sea level = 2116.117 pounds/foot2
Using the aspect ratio and the angle of attack, then the lift coefficient (CL) is as follows:
The angle of attack is held to zero during the ground roll until a rotation speed is reached. This rotation speed (in this simulation example) is at a calibrated airspeed of 100 knots. Upon reaching the rotation speed, the typical takeoff will rotate to some given angle of attack. Then, that angle of attack is held until the aircraft generates enough lift such that lift is greater than the weight and the aircraft lifts off the runway. The angle of attack profile used in this example simulation is as follows:
where we assume that
The angle of attack (a ) is limited to a pre-determined value. In the example that value is 13 degrees. In the numerical integration, 13 degrees angle of attack is reached at 143 knots calibrated airspeed. The lift first exceeds weight at airspeed of 156 knots. The aircraft (or the simulated aircraft) will lift off the ground when lift is greater than the weight.
Lift and drag are computed as follows using the mach number definition and ambient pressure ratio:
Finally, the last terms in our model are for the runway resistance. We will assume zero runway slope and a runway coefficient of friction, m = 0.015. Then,
under the condition that Frw = 0. for L > Wt since the aircraft will become airborne.
Now, the equation (previously derived above):
will reduce to
Also, the longitudinal load factor Nx was related to the excess thrust through the total gross weight by
where
During the ground roll, the h-dot term is zero. During the air phase, the normal load factor equation is used, i.e.,
where
and g = flight path angle.
From the NX , NZ and g equations we can integrate to find ground speed (Vg) and geometric height (h). All of the forces, however, are functions of airspeed and pressure altitude. We have assumed a standard atmosphere for temperature (in degrees Kelvin)
We can now find the true air speed using
where:
Vt = true airspeed
Vw = wind speed
if the wind speed were nonzero. We will assume wind speed equals zero in the example.
The following equations relating the aircraft's calibrated velocity, VC, to other parameters are given here for the sake of completeness, but whose derivation may be found elsewhere:
From the speed of sound and the mach number:

where
The compressible dynamic pressure, qC, may be calculated, knowing the ambient pressure and the mach number, by
The calibrated velocity of the aircraft with respect to a standard sea level day is then given by
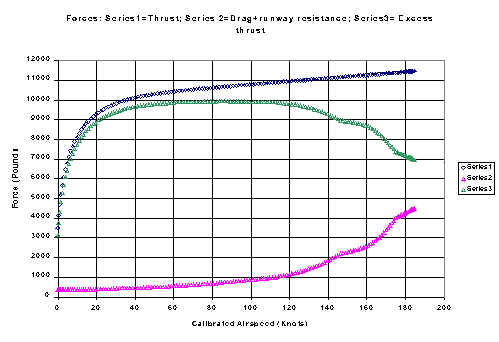
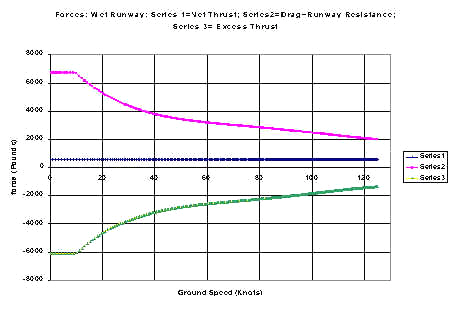
A plot of thrust, drag plus the runway resistance terms and excess thrust versus calibrated airspeed is shown in the following:
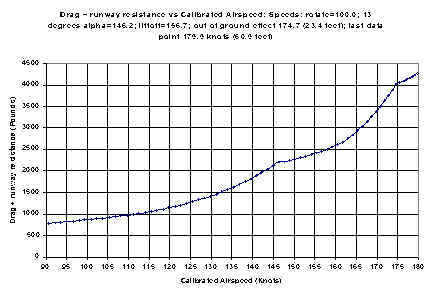
The following plot is a blow-up of just the drag from just before rotation to about 60 feet above the ground. This illustrates the changes in slope of drag versus speed as the fixed alpha is achieved and as the aircraft is no longer in ground effect. Of course, these are idealized computer simulations so one would not see such clearly defined effects in flight test data.
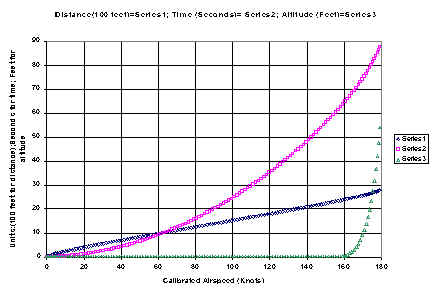
We can numerically integrate the equations to provide a plot of distance versus calibrated airspeed or height versus calibrated airspeed. By scaling the distance by a factor of 100, one can present both the longitudinal and vertical distance on one plot as follows.Units for y axis: 100 feet for distance (blue), seconds for time (purple)
and feet for altitude (green)
Effect of Runway Slope Using the pseudo-F-16 model, the effect of runway slope, the values of time and distance as a function of runway slope (in degrees) is shown in the following table. The average acceleration is computed as follows:
where:
t = time at liftoff (seconds)
d = distance at liftoff (feet)
Slope
distance time acceleration % from zero -1.0 3001 22.6 11.75 4.52% 0.0 3131 23.6 11.24 0% 0.5 3164 24.0 10.99 -2.29% 1.0 3247 24.6 10.73 -4.56% 2.0 3403 25.8 10.22 -9.06%
As can be seen, the effect of runway slope for this particular model is about 4.5% per degree of runway slope. For a typical light aircraft, the effect of runway slope is at least twice that amount, due to the much smaller thrust to weight ratio of the typical light aircraft. Although the percentage change in acceleration is about the same for a positive or negative runway slope, one must take into account the fact of having a negative absolute rate of climb at liftoff for a negative slope runway. For instance, for a liftoff at 100 knots ground speed with a negative 1.0 degree slope runway, the absolute rate of descent is about three feet/second. The rate of climb (or descent) with respect to the horizontal plane is given by:
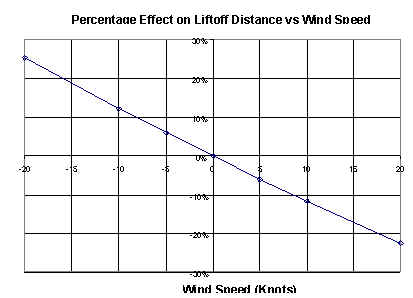
Effect of Wind on Takeoff Distance
Again using the same pseudo F-16 model, the following plot illustrates the effect of wind
Y axis: percent change in liftoff distance
Idle Thrust Decelerations
To assist in the development (or verification) of a Takeoff and Landing simulation, idle thrust decelerations may be performed. One would accelerate the aircraft on the runway to some high airspeed. Then, cut the throttle to idle and allow the aircraft to freely decelerate. We can solve for drag (D) in the above equation
and then put D into coefficient form.
where:
and
CD = drag coefficient
q = incompressible dynamic pressure
r = density
Lift and drag coefficients are discussed in the lift and drag section.
A more convenient form for the drag coefficient has been presented previously in the takeoff simulation portion of this section, namely:
Landing
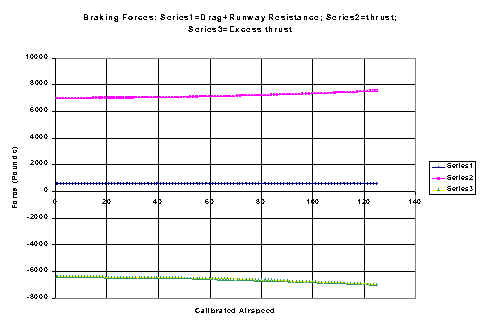
Braking Performance
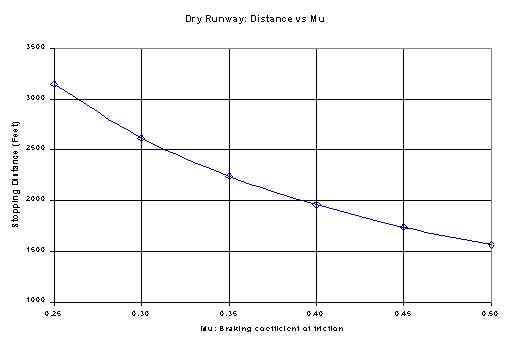
Using the same model that was used for takeoff portion of this page, one can see the effect of braking coefficient upon stopping performance. The thrust has been set to a constant 600 pounds, representing idle thrust. Minimum drag coefficient has been increased from 0.0500 to 0.0700 to account for additional drag devices (such as spoilers) activated during braking. For the following plot, the coefficient of friction has been set to a constant 0.35; this is a typical dry runway value. The initial ground speed was 130 knots for a calibrated airspeed of 126 knots. The gross weight has been reduced to 20,000 pounds, more representative of aircraft weight for landing speeds.
For a dry runway, the coefficient of friction, m, is typically on the order of between 0.25 and 0.50.
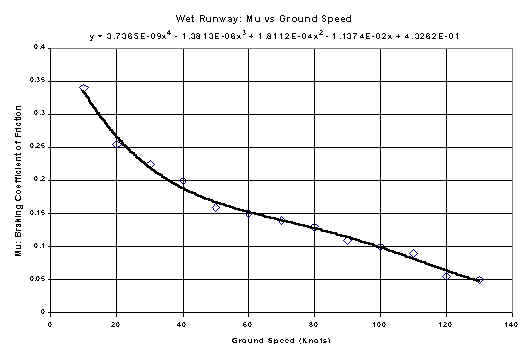
For wet runway conditions, the braking coefficient, m, is much less than for a dry runway. This is especially true at high speed where hydroplaning may occur. Hydroplaning is where the wheels ride on a film of water and never contact the runway. The following plot is of the braking coefficient computed from braking tests with the F-15C in 1977 at Edwards Air Force Base. The test was on a wet runway, with the water applied using water tankers. The data points were average values of the actual data and the line was a 4th order polynomial curve fit of the data points.
A warning is appropriate for using curve fits in simulations. Invariably the data will not extend to the full range of the desired simulation. Using the curve fit beyond the range of its data should be avoided by use of limits. A limit would be where the curve fit value (y) would take on some pre-determined constant value if the x value exceeds the highest (or lowest) value used in the curve fit. The limits that will be used in applying the curve fit will be the curve fit values at the extreme points. These are as follows.
Using the above curve fit (with its limits) for the m model leads to the following graph.
The simulation for our wet runway model produces a total distance of 6718 feet. This compares to a distance of 2241 for our dry runway model using a constant m of 0.35. That's a factor of three times longer for a wet runway. That's typical, but as the saying goes, "your results may vary".
The ALLSTAR network would like to thank Mr. Wayne Olson, a retired aeronautical engineer who worked at the Air Force Flight Center, Edwards Air Force Base, for providing this section of material and giving ALLSTAR permission to use it. Though the ALLSTAR network edited the material for clarity, the material is wholly Mr. Olson's and is copyrighted to him. Any questions about this material should be directed to Mr. Olson.
Send all comments to ![]() aeromaster@eng.fiu.edu
aeromaster@eng.fiu.edu
© 1995-98 ALLSTAR Network. All rights reserved worldwide.
| Funded in part by |
Updated: February 23, 1999