 |
|||||
| Home | Research | For Teachers | HISTORY Level 1 Level 2 Level 3 |
PRINCIPLES Level 1 Level 2 Level 3 |
CAREER Level 1 Level 2 Level 3 |
| Gallery | Hot Links | What's New! | |||
| Web Administration and Tools | |||||
|
|||||
| Home | Research | For Teachers | HISTORY Level 1 Level 2 Level 3 |
PRINCIPLES Level 1 Level 2 Level 3 |
CAREER Level 1 Level 2 Level 3 |
| Gallery | Hot Links | What's New! | |||
| Web Administration and Tools | |||||
Navigation Systems - Level 3
![]()
A. DESCRIPTION
One of the older types of radio navigation is the automatic direction finder (ADF) or non-directional beacon (NDB). The ADF receiver, a "backup" system for the VHF equipment, can be used when line-of-sight transmission becomes unreliable or when there is no VOR equipment on the ground or in the aircraft. It is used as a means of identifying positions, receiving low and medium frequency voice communications, homing, tracking, and for navigation on instrument approach procedures.
The low/medium frequency navigation stations used by ADF include non-directional beacons, ILS radio beacon locators, and commercial broadcast stations. Because commercial broadcast stations normally are not used in navigation, this section will deal only with the non-directional beacon and ILS radio beacon.
A non-directional radio beacon (NDB) is classed according to its power output and usage:
B. LIMITATIONS AND BENEFITS
Pilots using ADF should be aware of the following limitations:
Radio waves reflected by the ionosphere return to the earth 30 to 60 miles from the station and may cause the ADF pointer to fluctuate. The twilight effect is most pronounced during the period just before and after sunrise/sunset. Generally, the greater the distance from the station the greater the effect. The effect can be minimized by averaging the fluctuation, by flying at a higher altitude, or by selecting a station with a lower frequency (NDB transmissions on frequencies lower than 350 kHz have very little twilight effect).
Mountains or cliffs can reflect radio waves, producing a terrain effect. Furthermore, some of these slopes may have magnetic deposits that cause indefinite indications. Pilots flying near mountains should use only strong stations that give definite directional indications, and should not use stations obstructed by mountains.
Shorelines can refract or bend low frequency radio waves as they pass from land to water. Pilots flying over water should not use an NDB signal that crosses over the shoreline to the aircraft at an angle less than 30°. The shoreline has little or no effect on radio waves reaching the aircraft at angles greater than 30°.
When an electrical storm is nearby, the ADF needle points to the source of lightning rather than to the selected station because the lighting sends out radio waves. The pilot should note the flashes and not use the indications caused by them.
The ADF is subject to errors when the aircraft is banked. Bank error is present in all turns because the loop antenna which rotates to sense the direction of the incoming signal is mounted so that its axis is parallel to the normal axis of the aircraft. Bank error is a significant factor during NDB approaches.
While the ADF has drawbacks in special situations, the system does have some general advantages. Two of these benefits are the low cost of installation of NDBs and their relatively low degree of maintenance. Because of this, NDBs provide homing and navigational facilities in terminal areas and en route navigation on low-level airways and air routes without VOR coverage. Through the installation of NDBs many smaller airports are able to provide an instrument approach that otherwise would not be economically feasible.
The NDBs transmit in the frequency band of 200 to 415 kHz. The signal is not transmitted in a line of sight as VHF or UHF, but rather follows the curvature of the earth; this permits reception at low altitudes over great distances.
The ADF is used for primary navigation over long distances in remote areas of Canada.
C. ADF COMPONENTS
The NDB Control Panels figure, on the right, shows the major ADF components except the receiving antenna, which on most light aircraft is a length of wire running from an insulator on the cabin to the vertical stabilizer.
l . RECEIVER: Controls on the ADF receiver permit the pilot to tune the station desired and to select the mode of operation. \When tuning the receiver the pilot must positively identify the station. The low or medium frequency radio beacons transmit a signal with 1,020 Hertz (cycles per second [Hz]) modification keyed to provide continuous identification except during voice communications. All air facilities radio beacons transmit a continuous two- or three-unit identification in Morse code, except for ILS front course radio beacons which normally transmit a continuous one letter identifier in Morse code. The signal is received, amplified, and converted to audible voice or Morse code transmission. The signal also powers the bearing indicator.
Tuning the ADF- To tune the ADF receiver, the pilot should follow these steps:
2. CONTROL BOX - DIGITAL READOUT TYPE: Most modern aircraft have this type of control in the cockpit. In this equipment the frequency tuned is displayed as a digital readout of numbers rather than tuning a frequency band.
a) Function Selector (Mode Control). Allows selection of OFF, ADF, ANT or TEST Position.
b) Frequency Selector Switches. Three concentric knobs, permit selection of operating frequency. Two frequencies can be preselected. Only one can be used at a time. The transfer switch indicates the frequency in use.
c) Selected Frequency Indicators. Provides a visual read-out of the frequencies selected. The numbers can be printed on drums that rotate vertically or, in more modern sets, they arc displayed by light emitting diodes.
3. ANTENNAE: The ADF receives signals on both loop and sense antennae. The loop antenna in common use today is a small flat antenna without moving parts. Within the antenna are several coils spaced at various angles. The loop antenna senses the direction of the station by the strength of the signal on each coil but cannot determine whether the bearing is TO or FROM the station. The sense antenna provides this latter information, and also voice reception when the ADF function is not required.
 4. BEARING INDICATOR: As mentioned above, the bearing indicator (see
Fixed Card Bearing Indicator figure, on the right) displays the bearing to the
station relative to the nose of the aircraft. If the pilot is flying directly to the
station, the bearing indicator points to 0°. An ADF with a fixed card bearing indicator
always represents the nose of the aircraft as 0° and the tail as 180°.
4. BEARING INDICATOR: As mentioned above, the bearing indicator (see
Fixed Card Bearing Indicator figure, on the right) displays the bearing to the
station relative to the nose of the aircraft. If the pilot is flying directly to the
station, the bearing indicator points to 0°. An ADF with a fixed card bearing indicator
always represents the nose of the aircraft as 0° and the tail as 180°.
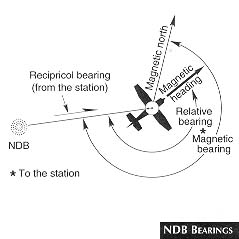 Relative bearing (see NDB Bearings figure,
on the left) is the angle formed by the intersection of a line drawn through the
centerline of the aircraft and a line drawn from the aircraft to the radio station. This
angle is always measured clockwise from the nose of the aircraft and is indicated directly
by the pointer on the bearing indicator.
Relative bearing (see NDB Bearings figure,
on the left) is the angle formed by the intersection of a line drawn through the
centerline of the aircraft and a line drawn from the aircraft to the radio station. This
angle is always measured clockwise from the nose of the aircraft and is indicated directly
by the pointer on the bearing indicator.
Magnetic bearing (see NDB Bearings figure, on the left) is the angle formed by the intersection of a line drawn from the aircraft to the radio station and a line drawn from the aircraft to magnetic north. The pilot calculates the magnetic bearing by adding the relative bearing shown on the indicator to the magnetic beading of the aircraft. For example, if the magnetic beading of the aircraft is 40° and the relative bearing 210°, the magnetic bearing to the station is 250°. Reciprocal bearing is the opposite of the magnetic bearing, obtained by adding or subtracting 180° from the magnetic bearing. The pilot calculates it when tracking outbound and when plotting fixes.
D. ADF OPERATIONS
1. MONITORING: Since the ADF receiver normally has no system failure or "OFF warning flags to provide the pilot with immediate indication of a beacon failure or receiver failure, the ADF audio must be monitored. The "idents" should be monitored anytime the ADF is used as a sole means of en route navigation. During the critical phases of approach, missed approach and holding, at least one pilot or flight crew member shall aurally monitor the beacon "idents" unless the aircraft instruments automatically advise the pilots of ADF or receiver failure.
2. HOMING: One of the most common ADF uses is "homing to a station".
When using this procedure, the pilot flies to a station by keeping the bearing indicator
needle on 0° when using a fixed-card ADF (See Homing to an NDB figure,
below right). The pilot should follow these steps: 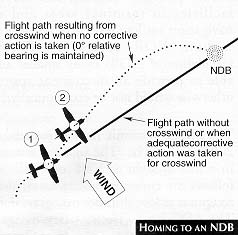
The figure Homing to an NDB, on the right, shows that if the pilot must change the magnetic beading to bold the aircraft on 0° the aircraft is drifting due to a crosswind. If the pilot does not make crosswind corrections, the aircraft flies a curved path to the station while the bearing indicator pointer remains at zero. The aircraft in position 2 must keep changing its heading to maintain the 0° relative bearing while flying to the station.
The bracketing method used here is basically the same as that explained elsewhere. The major difference is that bracketing a VOR requires the pilot to bracket a radial identified by the TB needle, whereas bracketing an ADF magnetic bearing requires the pilot to identify it by using both the bearing indicator and the heading indicator.
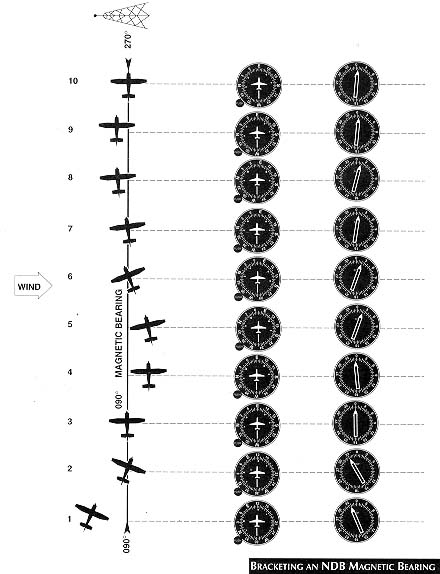 Assume the pilot of the aircraft in position l (see
Bracketing an NDB Magnetic Bearing figure, on the right) desires to intercept the
090° magnetic bearing to the non-directional beacon. The pilot then sets up an intercept
angle of 30° which is shown by the 120° heading of the aircraft. The ADF pointer
indicates 340°. Because the magnetic bearing equals the magnetic heading of the aircraft
and the relative bearing, the pilot adds 120° (the relative bearing) and finds that the
aircraft is on the 100° magnetic bearing.
Assume the pilot of the aircraft in position l (see
Bracketing an NDB Magnetic Bearing figure, on the right) desires to intercept the
090° magnetic bearing to the non-directional beacon. The pilot then sets up an intercept
angle of 30° which is shown by the 120° heading of the aircraft. The ADF pointer
indicates 340°. Because the magnetic bearing equals the magnetic heading of the aircraft
and the relative bearing, the pilot adds 120° (the relative bearing) and finds that the
aircraft is on the 100° magnetic bearing.
NOTE:
Whenever the aircraft heading and relative bearing equal more than 360° the pilot
should subtract 360° from the resulting figure. The pilot then follows the rest of the
bracketing procedure.
3. TRACKING FROM A STATION: A pilot can use ADF to track from a station by employing
the principles of bracketing a magnetic bearing. The Tracking from an NDB
figure, below left, illustrates an aircraft tracking outbound from a station with a
crosswind from the north. The reciprocal bearing is 090°, and the pilot tracks this
bearing by flying the aircraft with 10° of wind correction. The pilot knows that the
aircraft is tracking a reciprocal bearing because the heading indicator (080°) and
relative bearing (190°) equal the magnetic bearing (270°).
4. POSITION FIX BY ADF: The ADF receiver can help the pilot to make a definite position fix by using two or more stations and the process of triangulation. To determine the exact location of the aircraft, the pilot should use these procedures:
5. TIME COMPUTATION TO FLY TO A STATION: Computing time to the station is basically the same for ADF as it is for VOR (refer to Article 2.2.3. E (2)) therefore, a brief example is sufficient here. The basic procedure is to:
(TIME IN SECONDS BETWEEN BEARING CHANGE)/(DEGREES OF BEARING CHANGE) equals TIME TO STATION IN MINUTES.
For example, if it takes 45 seconds to fly a bearing change of 10°, the aircraft is:
45 / 10 = 4.5 min from the station.
To find distance to a station multiply time by distance covered in one minute using TAS or preferably G/S.
As with VOR procedures, a 10° bearing change is the simplest and easiest to use in making this calculation. If the pointer moves so rapidly that a satisfactory time check cannot be obtained during a 10° bearing change, this rapid movement indicates that the aircraft is very close to the station.
Send all comments to ![]() aeromaster@eng.fiu.edu
aeromaster@eng.fiu.edu
© 1995-98 ALLSTAR Network. All rights reserved worldwide.
| Funded in part by |
Updated: February 23, 1999