
Department of Mechanical and Materials
Engineering
This is Dr. Levy’s EML3222 System
Dynamics Fall 2019 page
Florida International University is
a community of faculty, staff and students dedicated to generating and imparting
knowledge through 1) excellent teaching and research, 2) the rigorous and
respectful exchange of ideas, and 3) community service. All students should
respect the right of others to have an equitable opportunity to learn and
honestly demonstrate the quality of their learning. Therefore, all students are
expected to adhere to a standard of academic conduct, which demonstrates
respect for themselves, their fellow students, and the educational mission of
the University. All students are deemed by the University to understand that if
they are found responsible for academic misconduct, they will be subject to the
Academic Misconduct procedures and sanctions, as outlined in the Student
Handbook.
The
FIU Civility Initiative is a collaborative effort by students, faculty, and
staff to promote civility as a cornerstone of the FIU Community. We believe
that civility is an essential component of the core values of our University.
We strive to include civility in our daily actions and look to promote the efforts
of others that do the same. Show respect to all people, regardless of
differences; always act with integrity, even when no one is watching; be a
positive contributing member of the FIU community.
Here is the (08/15/2018) syllabus for the
course.
My office is in EC3442, and email
address is levyez@fiu.edu
My tel. no. is 305-348-3643. My fax
no. is the department fax no. is 348-1932
My Office hours: 230-4pm W; 1230-2pm R; 1030-12pm F; by appointment
TA information: TBD
You will be
required to form a group of four students as
your study group and also for your project.
This material and all the linked materials provided,
except where stated specifically, are copyrighted © Cesar Levy 2019 and is
provided to the students of this course only.
Use by any other individual without written consent of the author is
forbidden.
Photocopies
of the 3 material selections relating to vibrations will be available from the
department office starting August 20.
Please make up your groups of four and one of you come to get the
materials. Cost is $15 per set. They will be used in the vibrations section of the course,
which will occur later on in the semester.
HWs will be assigned from this source later in the semester as well.
Here is Lecture
1 video and here are the pages related to the first lecture: page 1, page2, example,
page 3,
page 4,
page 5
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Please read Chapters 1 and 2 of the
Rowell and Wormley Intro to System Dynamics book
Here is Lecture
2 video and the pages related to the video: page 6, page 7,
and page 8.
{kind=link}
{kind=link}
{kind=link}
Please start reading Chapters 3 and
6 of the Rowell and Wormley System Dynamics book
Lecture
3 video: At the 45 minute mark of the video we begin the topic of system
dynamics by defining the through and across variables, the elemental and
constitutive equations, the ideal and pure element. page 9, page10, page11, examples,
page12,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
HW # 1 is: Problems 1.1, 1.4, 2.2, 2.4 from your Rowell
and Wormley books.
It will be due when announced in class.
Here is the material that goes
with Lecture
4 video: The video covers the rotational mechanical system elements page12, page 13,
page 14,
page 15,
page 16,
page 17,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here is the material that will go
with Lecture
5 video: The information on electrical elements begins at the end of page 17
and continues on page 18,
page 19,
page 20,
{kind=link}
{kind=link}
{kind=link}
The information on electrical
elements: capacitors, inductors and resistors are like electrical “masses”,
“springs” and “dampers”. Please read and
understand. The material will not be covered in depth in class but you will be
responsible for it. I
will skim over the material to cover the main elements, transformers and
transducers. Just note the similar way we can describe electrical elements.
This material and all the linked materials provided,
except where stated specifically, are copyrighted © Cesar Levy 2019 and is
provided to the students of this course only.
Use by any other individual without written consent of the author is
forbidden.
Continue reading chapter 6 on
transducers in one energy domain (transformers) and transducers in multi energy
domains (transducers)
Lesson 6 continues the materials
discussed in Lecture 5: examples
with electrical elements, examples
with electrical elements 2, page 21,
{kind=link}
{kind=link}
{kind=link}
Here are the pages that go with Lecture
6 on Fluid systems: page 22,
page 23,
page 24,
page 25,
page 26,
page 27,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here is the material that will go
with Lecture
7 video that covers more on the fluid systems and also begins thermal
systems as well: page 26,
page 27,
page 28,
page 29,
page 30,
{kind=link}
{kind=link}
{kind=link}
Here
is the material that will go with Lecture
8 video: page 30,
page 31,
page 32,
page 33,
page 34,
example
solution
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Please
read chapters 3 and 4 of Rowell and Wormley book on
system graphs. We will start talking
about those during the next lecture.
Here
are the Problems 1.1, 1.4, 2.2, 2.4 and the solutions: problem 1,
problem 2a 2b,
problem 3a 3b,
problem 4
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Having
completed the understanding of the basic ideal elements in each type of system
and their similarities, we now begin by showing you how to take physical
systems, simple ones first-then more complicated ones, and construct a system
graph made up of the elements we just discussed. The videos and pages from this point forward
deal with this new topic.
Here
is the material that goes with Lecture
9 video: page 36,
page 37,
page 38,
page 39,
page 40,
page 41,
page 42. This material deals with system graphs and
the governing equations for through variables and across variables.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here is the material that goes with Lecture
10 video: page 42,
page 43,
page 44,
page
44solution, page
45-46 examples, page
45-46solns. Here is the material
that goes with Lecture
10partb video: page 47,
page 48,
page 49,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
This material and all the
linked materials provided, except where stated specifically, are copyrighted ©
Cesar Levy 2019 and is provided to the students of this course only. Use by any other individual without written
consent of the author is forbidden.
First Exam is announced for the 9th of October.
It will cover definitions given in the first handout, your knowledge of
the equations for the different systems’ ideal elements, similarities and
differences with thermal systems and also know how to work out linearization
problems.
Here is the material that goes with Lecture
11 video: page 49,
page 50,
and page
51. Here is the material that goes
with Lecture
11 part b video: page 52,
page 53,
and page
54. The last portion deals with an
example that involves a transformer and how to represent it in a system graph.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here are your choices for project (the ones with
strikethrough are already taken):
Foot Driven Potter’s wheel
Normal two wheel Bicycle operation
Simplified
Operation of a grandfather’s clock
car braking
system (from foot brake to wheel) as mentioned in class
electric
shaver
Foot driven
paddle wheel boat
animal
powered grinding mill (used in 3rd world countries to grind wheat)
water
powered grinding mill (as found in the northeast in the late 1700’s-early
1900’s)
Windmill
operation/Wind turbine operation
windshield
wiper operation (check patent to understand how it
works)
manual
garage door system where human pulls on a chain to lift the door to the garage
car steering
system (steering wheel to tire wheels) --torque you apply to steering wheel is
input
manually
operated dumbwaiter systems
spinning
wheel used to spin sheep’s wool into thin thread or yarn
fishing pole
reel mechanism
hand mixer
ANY OTHER
ACCEPTABLE PROJECT I APPROVE
Please note
that choice of projects are
first come first served basis.
Project Information:
You will be expected to work as a part of a team
of 4. We have 55 students in the
class-therefore there should be 14 projects (14x4). PLEASE SEND ME THE NAMES OF THE 4 STUDENTS
and YOUR TOP 3 PROJECTS IN CASE YOU ARE CLOSED OUT OF THE ONE YOU WANT
This material and all the
linked materials provided, except where stated specifically, are copyrighted ©
Cesar Levy 2019 and is provided to the students of this course only. Use by any other individual without written
consent of the author is forbidden.
You will be expected to produce and turn in a
project report by Nov. 29 in
a form similar to your lab reports. The report will include:
·
An
introduction detailing what you are planning to model,
who your team members are and what they have contributed to the project;
·
Modeling
section in which you give the system you are
investigating and the modeling of your system, and the assumptions you are
making. You will show the elemental
equations, nodal equations, path (loop) equations, the state variables,
sources, and the state variable equations and the matrix form of those
equations. You will be expected to explain the expressions for the constants
you use in your elemental equations—this should come from the simplifying
assumptions you make.
·
A results
section in which you detail the numerical equations you
will be using to solve the problem, the parameters you will be using in your
equations and where those parameters have been obtained, the graphs of the
state variables as a function of time, the outputs you want to find as a
function of time;
·
and
finally a Discussion of your results. Also discuss the step-size you use and its effect on the
accuracy of the results
·
What
have you learned from the project and what would you suggest for future work to
understand the results more fully.
You will need to vary at least 3 parameters to see
the effect of parameter variation on your solutions. Your discussion section should be in depth—how
each parameter change affects the overall results. All graphs should be properly labeled (units,
what are the parameters tested).
Additional to the parameter variations above, you will be
expected to vary the source variables.
In all your projects you probably have one source (maybe
more). Please take one of the sources in the form A + B sin(omega*t)
where A is the amplitude of the source strength and B is the variation in the
source strength and omega is the frequency of the variation. Please vary at
least two of these variables; for instance you can take B as being 0.1 A, 0.3
A; or omega as being some value between 0.5 pi to 2
pi.
PROJECTS ARE DUE TO MY
OFFICE (EC3442) BY Nov.
29 by 3pm. YOU MUST GIVE ME THE PROJECTS, NOT SLIDE
THEM UNDER MY DOOR. ITEMS SLID UNDER
MY DOOR WILL NOT BE EVALUATED AND THE TEAM THAT DOES WILL GET A ZERO; SO
PLEASE FOLLOW INSTRUCTIONS.
Please note that our first quiz will be on Wednesday,
October 9 and will cover the similarities and differences between systems we
have discussed. The first quiz will test
you: regarding thru, across variables, integrated thru and integrated across
variables, energy expressions for the different types of systems we have
discussed (linear mechanical, rotational mechanical, electrical, fluid and
thermal), definitions from first handout.
You will not be allowed any aids. The quiz will require you to remember things
like definitions of transformers and transducers and the difference between a
regular transducer and a gyrating transducer, major differences between thermal
systems and the other systems.
Please note that the first major exam will be on
October 24.
In the exam you will be given a system and you will be asked to obtain the system graph and
to derive the elemental equations (including transformer/transducer equations
if any), the node equations (continuity), the path equations (loop,
compatibility), and also some if not all the state equations (which will
be covered shortly after system graphs are completed). Formula sheets will be allowed and will be
discussed as we get closer to the exam date.
Please do problems 4.1,
4.2, 4.5 and 4.11 in your system dynamics books.
Here is the material that goes with Lecture
12 video: page 54,
These are the solution to page 54 top and bottom
problems page
55, page
56. We also cover page 57,
page 58,
{kind=link}
{kind=link}
{kind=link}
{kind=link}
We now begin talking about state equations.
I AM INCLUDING HERE TWO PDF FILES THAT MIGHT HELP YOU: ONE IS ON LINEAR GRAPHS AND ONE IS ON STATE EQUATIONS. THESE DOCUMENTS ARE THE PRECURSOR DOCUMENTS THAT LED TO THE BOOK SYSTEM DYNAMICS, AN INTRODUCTION, BY ROWELL AND WORMLEY. You can find more examples for deriving state equations. Please note that the figure numbers used in the file can be found at the end of the file.
You are also suggested to develop the state
equations for three problems -- the two problems we did (given on page 54, 55
and 56 of the notes on the website) and problem 6.15 in your book.
We now begin talking about state equation solutions. This solution methodology depends on understanding matrices. For those who need a review of matrices, here it is.
This material and all the
linked materials provided, except where stated specifically, are copyrighted ©
Cesar Levy 2019 and is provided to the students of this course only. Use by any other individual without written
consent of the author is forbidden.
Here is the material that goes with Lecture 13 video: discussed state variables and how to get the state variable equations and how to solve state variable equations- page 57, page 58, page 59, page 60,
{kind=link}
{kind=link}
As a review of system graph and
state equation derivations we look at this problem.
We also show the state equation solution which is given in the top half
of the page.
{kind=link}
{kind=link}
Here is the material that goes with Lecture
14 video: We discuss the following
system including getting the system graph. We also show the state
equation solution which is given in the bottom
half of the page. We have given a
handout for the system graph for a fluid system connected to a
piston/spring. We will derive the state
equations. Also, prob. 7.29 on that
sheet will be discussed and one of the state equations will be derived but you
are to derive the remaining state equations.
{kind=link}
Please note that the first major exam will be on
October 24.
In the exam you will be given a system and you will be asked to obtain the system graph and
to derive the elemental equations (including transformer/transducer equations
if any), the node equations (continuity), the path equations (loop,
compatibility), and also some if not all the state equations (which are
being covered now after system graphs are completed). Formula sheets will be allowed and will be
discussed as we get closer to the exam date.
At present, other examples are being discussed in class that
may not appear in the videos. It would
be to your benefit to come and see more examples so that you can prepare for
the
HERE are the solutions to PROBLEMS 4.2, 4.3, 4.6d and 4.11d
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here is the material that goes with Lecture
14-15 video: Halfway through the video we start discussing the numerical solution of
the state variable differential equations given in page 61,
page 62. This material will NOT be part of the first
exam but may be part of the second exam.
{kind=link}
{kind=link}
We continue our discussion of
numerical solutions of the state equations in Lecture
16. The rest of the numerical solution of sets of first order differential
equations will be discussed. A handout
will be given in class on the Runge-Kutta
method. The handout is from Applied
Numerical Methods by James, Wilford and Smith, pages
339-345 and 351-353. We will look at
several examples and how they could be used in the different numerical methods
discussed, namely: Euler, Modified Euler, Runge-Kutta
Second Order method, Runge-Kutta Fourth Order Method
This material and all the
linked materials provided, except where stated specifically, are copyrighted ©
Cesar Levy 2019 and is provided to the students of this course only. Use by any other individual without written
consent of the author is forbidden.
We continue our discussion of
numerical solutions of the state equations in Lecture
17. We will work on several problems
(4th order and 2nd order RK methods).
REMINDER the first MAJOR exam will be on October 24. In the exam you will be given a system and
you will be asked to derive the elemental equations (including
transformer/transducer equations if any), the node equations (continuity), the
path equations (loop, compatibility), and also some if not all the state
equations (which will be covered shortly after system graphs are
completed). you are allowed 3 8.5 x11 in
formula sheets (back and front). You can
put pgs 171-172 of your book, the 4 tables (3.1-3.4)
and notes to yourself. NO SOLVED
PROBLEMS ON THE SHEETS, OTHERWISE YOUR SHEETS WILL BE CONFISCATED.
you
are allowed pens, pencils, erasers, straight edge and your simple calculator,
if needed.
Turn
OFF all cellphones and electronic devices.
Your phones cannot be used as
calculators.
We begin the vibrations portion of
the course. Here is Lecture
18 video: equation of motion for linear mechanical, linear rotational,
inverted pendulum
Lecture 19: 2nd
examination on system graphs. We
continue with the vibration of undamped SDOF systems
Here is Lecture
20 video: equivalent springs both linear and rotational, springs in
parallel and series
Please start
reading the first and second section-Chapter 1 and 2 materials from the materials obtained from
the office manager (EC3475). I
will be assigning examples out of those materials. So it would be to your benefit to come pick
up the copies for your group.
Third Exam
(2nd major exam) on numerical methods is announced for Nov. 6, 2019
(THIS IS A CORRECTION). The exam will
cover numerical methods. See next page
for details.
This material and all the linked materials provided,
except where stated specifically, are copyrighted © Cesar Levy 2019 and is
provided to the students of this course only.
Use by any other individual without written consent of the author is
forbidden.
Out of the photocopies of
the first two selections do the following:
Problems 1.7 to 1.10, 1.13, 1.16, 1.19, 1.22, 1.26, 1.27, 1.29, 1.31,
1.32, and 1.36. Solutions will be posted
in a week’s time.
Please
make sure that you have the following information about second order systems,
namely:
 where g is the
acceleration of gravity and Dst is the static
displacement of the system; that is, weight of the system = k*Dst.
where g is the
acceleration of gravity and Dst is the static
displacement of the system; that is, weight of the system = k*Dst.
Please
use the Greek capital letter D
for the static displacement instead of
the normal d, as the letter d is to be used for the logarithmic
decrement, and they should not be confused.
And for systems with damping
included: ![]() =2ςωn and
=2ςωn and ![]() =ς and Ccrit=2√mk =2mωn
=2k/ωn
=ς and Ccrit=2√mk =2mωn
=2k/ωn
Lecture
21: 2nd examination
is announced for Wednesday, Nov 6 (THIS IS A CORRECTION) and will be on numerical methods. It will cover the numerical solution of state
equations. You will be allowed pens,
pencils, straight edge, erasers and your calculator. You will be
allowed three 8.5 x 11 formula sheets. Please ensure your formula sheets include the
formulas for the Euler, Modified Euler, Runge Kutta 2nd order, Runge
Kutta 2nd order Midpoint, 4th
order Runge Kutta and how
to handle numerically the solution of one or more state variable
equations.
In
addition you should know the local and global errors
for each of the methods. You should know
how to use that information to show the advantages of one method over another
as we did in class, i.e., comparing global errors between different methods to
find the stepsize, or to determine the number of floating
point operations saved for a certain number of steps.
Any solutions found on your formula sheets will
have the formula sheets confiscated.
Here is Lecture
22 video: equivalent springs and masses using equivalent potential and
kinetic energies
Please
review the videos for Lessons 18, 20, 22 as we will be doing similar type
problems for you to understand the method of solution.
This material and all the linked materials provided,
except where stated specifically, are copyrighted © Cesar Levy 2019 and is
provided to the students of this course only.
Use by any other individual without written consent of the author is
forbidden.
Here is Lecture
23 video: we look at damped systems, derive equations and talk about
overdamped, critically damped and underdamped systems
Please
note that for underdamped systems: the logarithmic decrement, δ, equals  where ζ is the
damping ratio, C/Crit.
where ζ is the
damping ratio, C/Crit.
Also
we show that δ = (1/N) * ln(xo/xN) = (1/N) * ln(xi/xi+N)
where N = the number of cycles
between the first and last measurement.
x here is the displacement and the subscript “o” means the first measurement value. The formula also applies between any N
cycles, meaning starting from cycle i and going to
cycle i+N.
We will discuss the forced vibration
of systems and cover the topic of resonance.
The following change is
announced: Projects will be due on
Monday, December 2 at 3pm in my office.
Do your best to turn it in physically.
If you cannot make it, please contact me for other arrangements.
The following is also
announced: Your third major exam on
vibrations will be on December 4.
You will be allowed 3 8.5 x11 sheets of formulas. The topic of the exam includes: vibrations of
undamped SDOF system; how to determine k equivalent
(look at the Cochin handout) and equivalent masses based on where they are
placed using equivalent energies; damped vibration systems with coulomb or
viscous damping;
systems that are overdamped, critically damped and underdamped.
Be able to derive equations of motion. Materials
from the forced vibration of a single degree of freedom system including,
resonance, calculating the steady state motion for a SDOF system and how to
determine forces transmitted to the support.
Here are solutions to some of the
problems… problems 1-7 and
1-8, 1-9 and 1-10
Here are solutions for problems 1-13a
and 1-13b,
1-29, 1-30,
1-35
and 1-35b
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here is Lecture
24 video: we look at underdamped systems, derived logarithmic decrement and
talk about two problems.
Look at Problems
2.1-2.4, 2.6, 2.7, 2.17 to 2.19, 2.28, 2.38, 2.45, 2.52, 2.60, 2.80, 2.82,
2.83, and 2.97 in the handouts obtained from the department.
This material and all the linked materials provided,
except where stated specifically, are copyrighted © Cesar Levy 2019 and is
provided to the students of this course only.
Use by any other individual without written consent of the author is
forbidden.
Please
make sure that you have the following information about second order systems,
namely:
where g is the
acceleration of gravity and Dst is the
static displacement of the system; that is, weight of the system = k*Dst.
Please
use the Greek capital letter D
for the static displacement instead of
the normal d, as the letter d is to be
used for the logarithmic decrement, and
they should not be confused.
And for systems with damping
included: ![]() =2ςωn and
=2ςωn and ![]() =ς and Ccrit=2√mk =2mωn
=2k/ωn
=ς and Ccrit=2√mk =2mωn
=2k/ωn
Please
note that for underdamped systems: the logarithmic decrement, δ, equals ![]() ,
,
where
ζ is the damping ratio, C/Ccrit. Also ζ=δ / sqrt(4π2+δ2),
which for z <0.3 can be approximated by ![]()
Also δ = (1/N) * ln(xo/xN) = (1/N) * ln(xi/xi+N)
![]()
where N = the number of cycles
between the first and the N+1st measurement. Here x is the displacement and the subscript “o” means
the initial measurement value.
The formula also applies between any N cycles; meaning, starting from
cycle i and going to cycle i+N.
Please make sure you review the videos for Lessons 18-24 as they cover
the materials for this last exam.
We will discuss the forced vibration
of systems and cover the topic of resonance.
This material and all the linked materials provided,
except where stated specifically, are copyrighted © Cesar Levy 2019 and is
provided to the students of this course only.
Use by any other individual without written consent of the author is
forbidden.
Here are solutions for problems
similar to 2-4,
2-6 and 2-7 in the vibrations handout obtained from the department office
manager. Problem 2-7 requires moving the
springs to the location of the mass.
{kind=link}
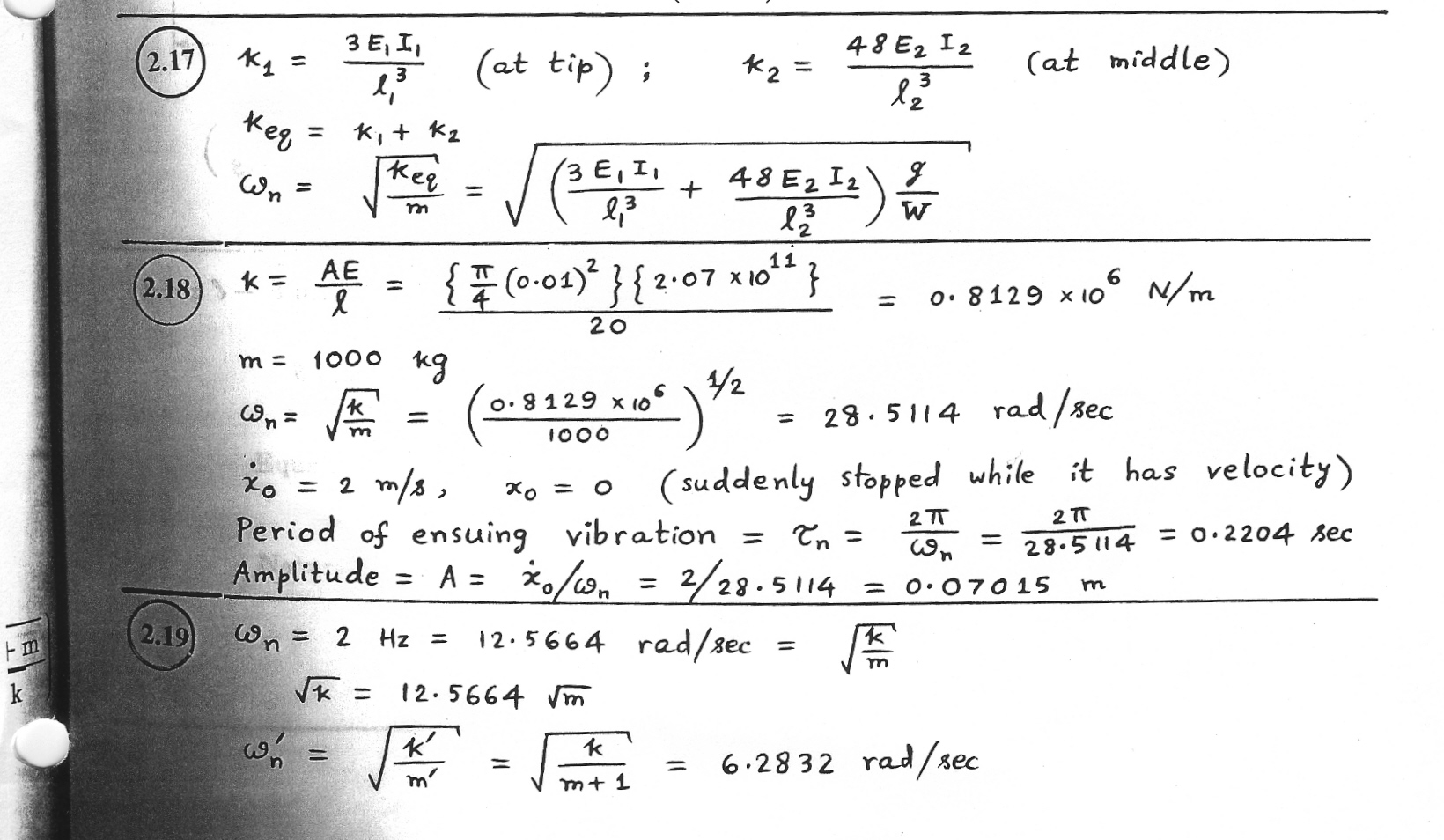
Here are problems 2-17,
2-18, 2-19. In problem 2-17 both
springs see the same displacement. For
2-18 use the equivalent k for extension of a wire.
{kind=link}
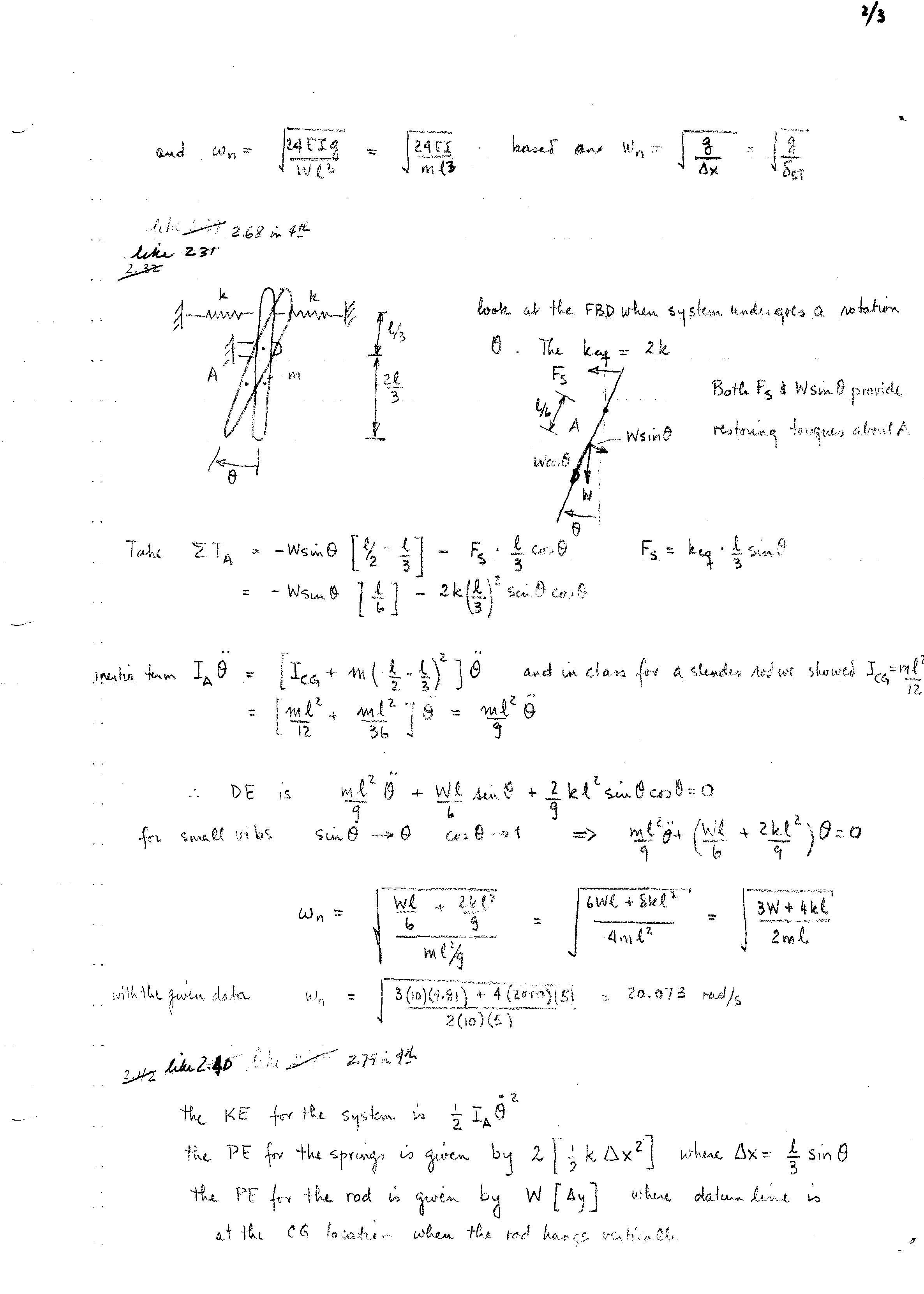
Here are problems like
2-28, 2-38
{kind=link}
Here is the rest of 2-38,
and problems 2-68, 2-79
{kind=link}
Here is problem 2-45
{kind=link}
Here is problem 2-60
{kind=link}
Here, the second problem is like
problem 2.80. Note, overshoot represents the maximum
displacement above the x=0 line, i.e., when the velocity=0.
{kind=link}
Here are problems the first two are
like 2.83,
2.97
{kind=link}
Lecture 25: We begin by discussing
the case of forced vibrations. The
following problems deal with forced
vibrations from Chapter 3 of the handouts obtained from the department office
manager. Here are problems
3.1, 3.2, 3.8, 3.10. Also try problems 3.25, 3.26—No solutions will
be given for these…
{kind=link}
Here is a video related to beats,
undamped forced motion
Lecture 27: we start discussion of
the rotating unbalance situation and show that the equation of motion is very
similar to that for the system under forced motion if F(t) =moewf2 sin wf t
Lecture 28: we continue discussing
rotating unbalance. Here is a video related to rotating
unbalance
This material and all the linked materials provided,
except where stated specifically, are copyrighted © Cesar Levy 2019 and is
provided to the students of this course only.
Use by any other individual without written consent of the author is
forbidden.