
Pictures







People
Members
Alex Han (Team Leader)
Mike Thom (Team Secretary)
Jose Vives (Team Accountant)
Robert Sobrado (Team Specialist
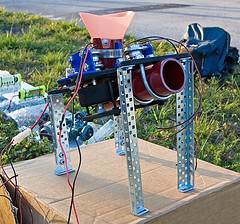
Autonomous Mobile Competition Robot
GOAL STATEMENT
To design and build an autonomous robot that can perform a specified task
given in detail by the IEEE SoutheastCon 2007 Competition.
OBJECTIVES/CONSTRAINTS
Complete design and fabrication for IEEE SoutheastCon Competition in
March.
Design a mechanical system that will allow us to shoot the ping pong balls
efficiently.
Design and fabricate structure that will navigate the court and support
the shooting mechanism
Determine the power consumption and supply the needed power with batteries
FORM AND FUNCTION
Robot has to be 12” X 12” X 12”, can extend 6” beyond in any one direction
after start
Has be able to launch balls at a hoop at the center of the court 18” above
floor
Has to be able to request balls at “Ball Request Zone” by receiving an IR
LED transmitted code
Be able to navigate throughout the court
CHALLENGES
Create a fully functional robot that will place at the competition in
March and do so with a limited budget.
To take on a task that has never been accomplished by any member of our
team and to stretch the limits of our knowledge to fulfill the task.
TIMELINE
Finnish design by January 20th.
Have the gun and driver system done by January 31st
Have the robot pieces assembled by February 10th.
Complete programming of robot by March 1st and start rigorous testing
Competition on March 22-25 in Richmond, VA