Florida
International University, Department of Mechanical and Materials Engineering
EML
4806 and EML 5808
Homework
assignment 3
Use analytical analysis to solve the following problems
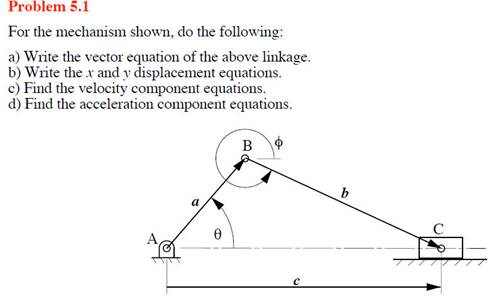
In
the above mechanism, if a =1 cm, b = 4cm, θ = 60°, dθ/dt˙ =10 rad/sec (constant),
determine:
e) The angle ϕ of link b, and position
c of the slider.
f) The angular
velocity dϕ/dt of link
b, and velocity of the slider.
g) The angular
acceleration d2ϕ/dt2 of link b, and acceleration of
the slider.
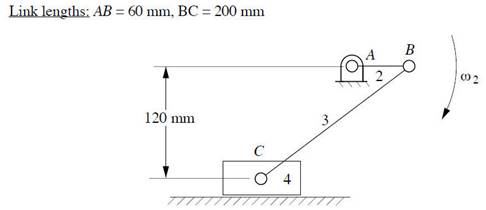
Problem 2.6
In the mechanism
shown below, link 2 is rotating CW at the rate of 100 rad/s (constant). In the
position shown, link 2 is horizontal. Use loop equation approach to determine:
a) The position
of the slider and angle θ3 of the link 3.
b) The velocity
Vc4 of the slider and angular velocity ω3 of link 3.
c) The
acceleration ac4 of the slider and angular acceleration α3
of link 3.
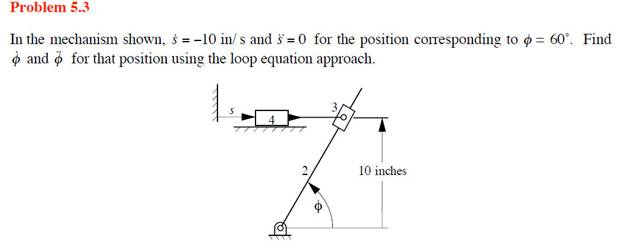
In the mechanism
in Problem 5.3 assume that dϕ/dt is 10 rad/s CCW. Use the loop equation approach to determine the velocity and acceleration of slider
4 for the position defined by ϕ = 60°.
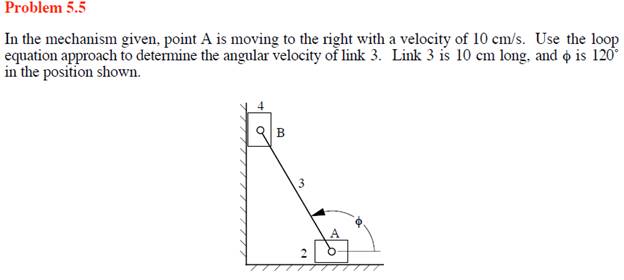
In the mechanism
in Problem 5.5, determine the angular acceleration of link 3, the velocity and
acceleration of slider 4.
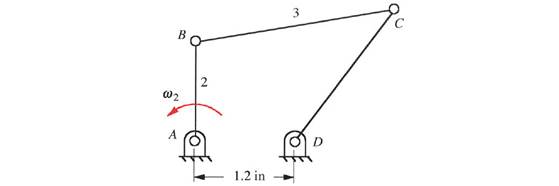
Problem 2.2
In the mechanism
shown below, link 2 is rotating CCW at the rate of 500 rad/s (constant). In the
position shown, link 2 is vertical. Use loop equation approach analytic methods
to determine:
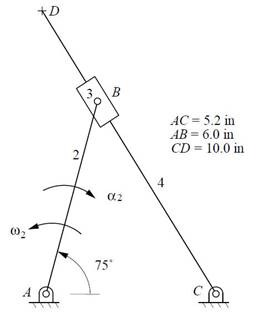
a) The angle
θ3 of the link 3 and θ4 of the link 4.
b) The angular
velocity ω3 of the link 3 and ω4 of the link 4.
c) The angular
acceleration α3 of link 3 and α4 of link 4.
Link lingths: AB =
1.2 in, BC = 2.42 in, CD = 2 in.
Problem
3.13
In the mechanism
shown below, the angular velocity of link 2 is 2 rad/s CCW and angular
acceleration is 5 rad/s2 CW. Use loop equation approach to
determine:
a) The position
of the slider rB4 and angle θ4 of the link 4.
b) The velocity
vB4 of the slider and angular velocity ω4 of link 4.
c) The
acceleration aB4 of the slider and angular acceleration α4
of link 4.
d) The velocity
vD4 and acceleration aD4 at the point D of link 4.